Galil Motion Control amp 19540 manual Page 8
Setup
Connect an unregulated DC power supply (18-80 V) to the POWER connector. Before applying drive power for the first
time, take appropriate safety precautions: set a small error limit (ER *= 1000), set Off on Error for all axes (OE *= 1),
and set a low torque limit (TK *= 2; TL *= 2).
Amplifier Setup
Select the amplifier gain that is appropriate for the motor. The amplifier gain can be set to 0.4 A/V (AG0 jumper), 0.7
A/V (no AG jumper), and 1.0 A/V (AG2 jumper). This is the only jumper setting required to begin turning a motor;
however, more jumper settings may be required to configure the optional shunt regulator, amplifier error monitoring,
optoisolation power, and external amplifiers (see next section, Jumpers).
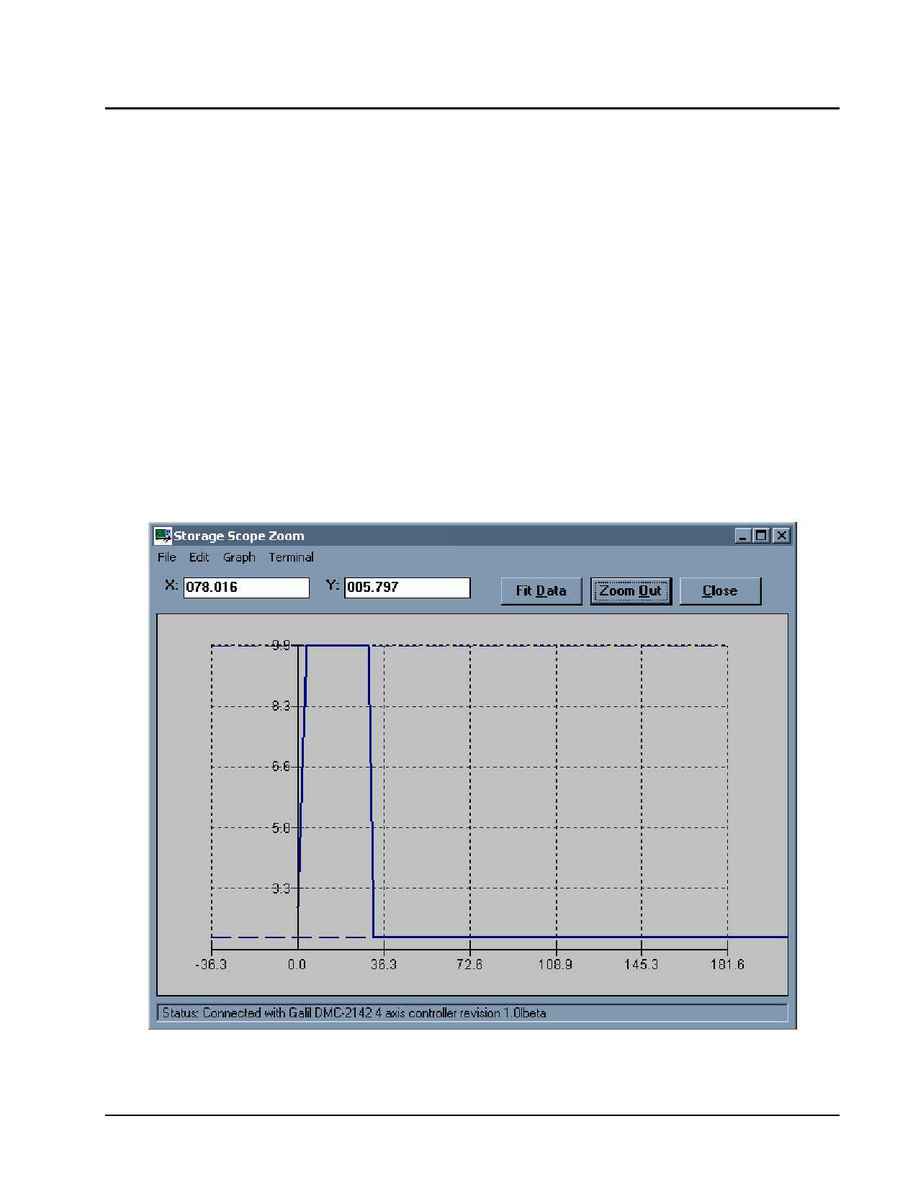
Peak and continuous torque limits can be set through TK and TL respectively. The TK and TL values are entered in
volts on an axis-by-axis basis. The peak limit sets the maximum voltage that will be output from the controller to the
amplifier. The continuous current sets what the maximum average current is over a quarter second interval. The
following figure captured with WSDK shows the continuous and peak operation. The continuous limit was 2 V and the
peak limit was 10 V (if the gain is set to 0.7 A/V, a torque limit of 2 causes the amplifier to never exceed 1.4 A on the
specified axis).
Figure 3. Peak and Continuous Current Operation
8
·
Setup
AMP-19520/40