TECHNICAL REFERENCE
MOTION PROGRAMMING
TRIPPOINTS
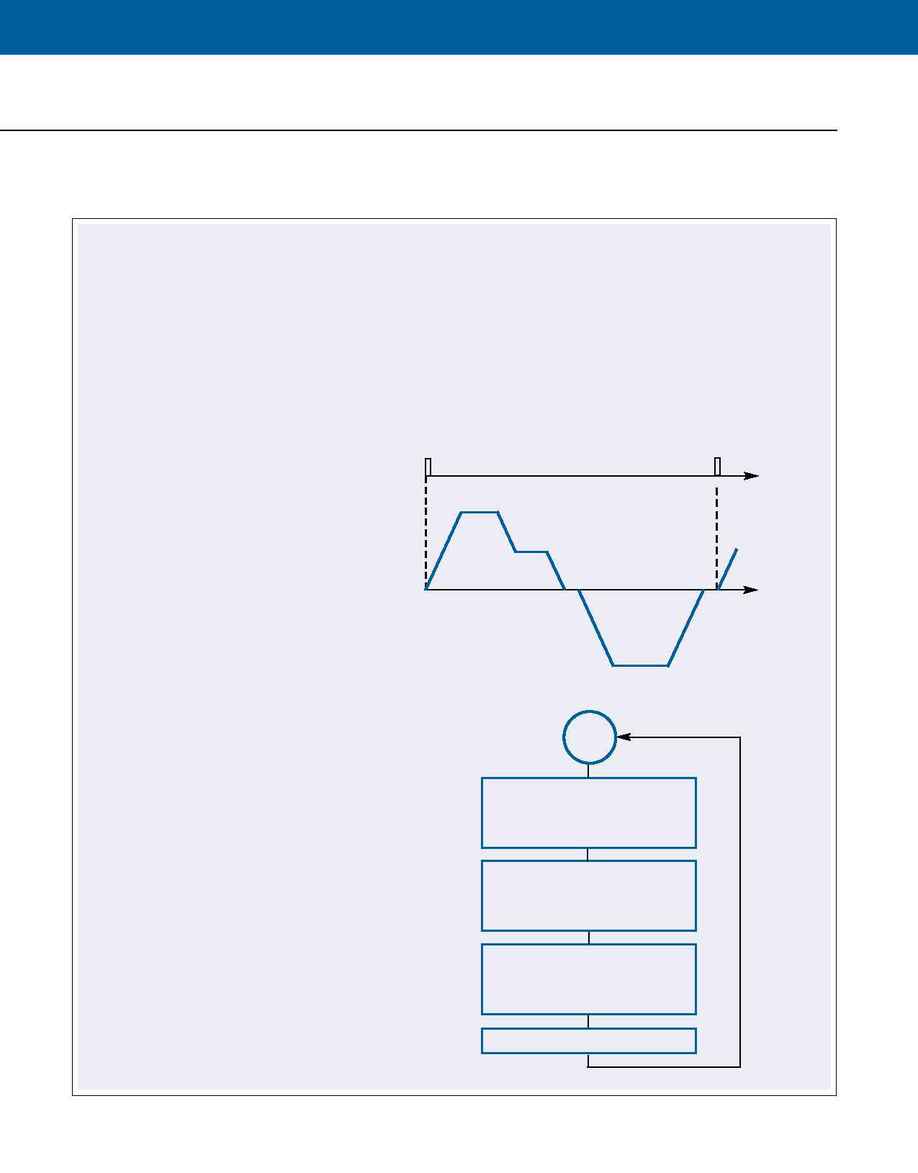
Consider the motion cycle illustrated below. A forward motion of 10,000 counts must start upon a pulse on input #1.
The initial velocity, acceleration, and deceleration rates equal 20,000, 100,000, and 100,000 respectively.
After the motor has moved a distance of 6000 counts, the controller starts a deceleration toward a speed of 10,000 counts/sec.
That speed is maintained for the rest of the move. Upon completion of the motion, the controller waits 100 milliseconds
before returning the motor to the starting position, at a speed of 20,000 counts/sec. Once there, the controller is ready to
repeat the cycle.
Notice that the scheduling of the various functions requires the use of trippoints. The start of the motion is delayed by
the trippoint AI 1. When the motion starts, the velocity change is scheduled with the trippoint AD 6000. The controller
must then wait until the completion of the move (AMX) and adds a pure delay of 100 ms (WT 100) before returning the
motor to the starting position. The instruction program and resulting flow chart follow.
INSTRUCTION
INTERPRETATION
#CYCLE
Label
PR 10000
Distance
SP 20000
Initial speed
AC 100000
Acceleration rate
DC 100000
Deceleration rate
AI1
Wait for start pulse
BGX
Start motion
AD 6000
Wait until X moves 6000 counts
SP 10000
Change the speed
AMX
Wait for completion of move
WT 100
Wait 100 msec
PR -10000
Reverse motion
SP 20000
Return speed
BGX
Start motion
AMX
Wait for end of motion
JP#CYCLE
Repeat the cycle
EN
End
Example--Motion Cycle using Trippoints
INPUT 1
TIME
TIME
-20000
20000
10000
VELOCITY
Flowchart for #Cycle
AFTER A DISTANCE
OF 6000 COUNTS
SPEED=10000
WHEN MOTION IS COMPLETE WAIT 100 ms
MOVE BACK 10000
AT SPEED 20000
DISTANCE=10000
SPEED=20000
WAIT FOR INPUT 1
START THE MOTION
CYCLE
WHEN MOTION IS COMPLETE
84
·
Galil Motion Control, Inc.
·
www.galilmc.com