MOTION PROGRAMMMING
TECHNICAL REFERENCE
STORED PROGRAMS
The generation of more complex moves is described in
the section about coordinated moves.
The instructions to execute the motion can be issued
directly from the host computer, resulting in an immediate
move. This requires the continuous involvement of the
host computer. This requirement is often undesirable
because the host may have to perform other functions
simultaneously. An alternative method is to combine sever-
al motion commands into a complete application program
which is downloaded to the controller memory. This
method reduces or eliminates the involvement of the host
computer. The DMC can receive its instructions from
stored programs. To start the motion, the host sends a
short command, such as XQ#A to execute Program A. The
controller will then receive the instructions from its memo-
ry without the intervention of the host computer.
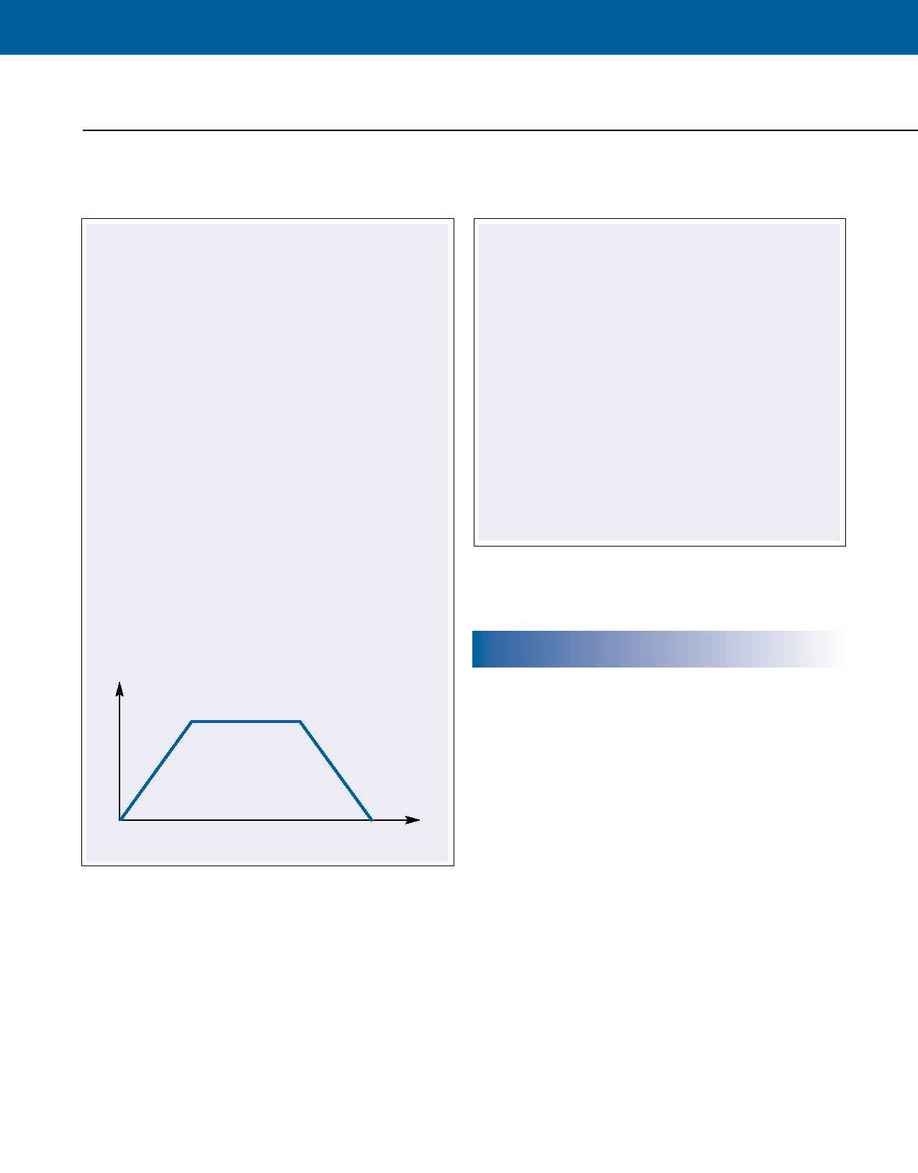
For example, let the encoder resolution be 4000 counts per
turn and suppose the objective is to rotate the motor one
revolution along a trapezoidal velocity, with a total motion
time of 0.3 sec with acceleration and deceleration times of
0.1 sec each. Simple calculation indicates that the slew
velocity equals 5 revolutions per second and that both
acceleration and deceleration rates are 50 revolutions/sec2.
The motion parameters can be expressed in terms of units
of resolution: a distance of 4000 counts, a slew velocity of
20,000 counts/sec, and acceleration and deceleration
rates of 200,000 counts/sec2. The motion parameters
must be transmitted from the host computer to the
motion controller. The special instructions used by the
DMC, along with their interpretation, are given below.
The host computer sends the characters indicated by
the program shown above and the motion starts imme-
diately.
INSTRUCTION
INTERPRETATION
PR 4000
Relative distance
SP 20000
Speed rate
AC 200000
Acceleration rate
DC 200000
Deceleration rate
BGX
Start motion of X motor
Example--Point-to-Point
Another type of simple motion is the jog move. Here the
motor is commanded to run indefinitely at a specified
speed. The motion parameters in this case are limited to
speed, acceleration, and deceleration. These parameters can
be expressed in units of resolution as illustrated.
Consider a system where the resolution of the
encoder is 4000 counts/turn and the motor is required
to run at a speed of 600 rpm (10 revolutions/sec) and
must accelerate to that speed over 100 msec. Simple cal-
culations show that the speed is 40,000 counts/sec and
the acceleration is 400,000 counts/sec2.
INSTRUCTION
INTERPRETATION
JG 40000
Jog speed
AC 400000
Acceleration rate
BGX
Start X motion
Example--Jog Move
SLEW SPEED
VELOCITY
ACCELERATION
RATE
DECELERATION
RATE
TIME
STORED PROGRAMS
www.galilmc.com
·
Galil Motion Control, Inc.
·
81