Galil Motion Control note 3312 Page 2
Velocity
10
5
counts/sec
time
.25 sec
0
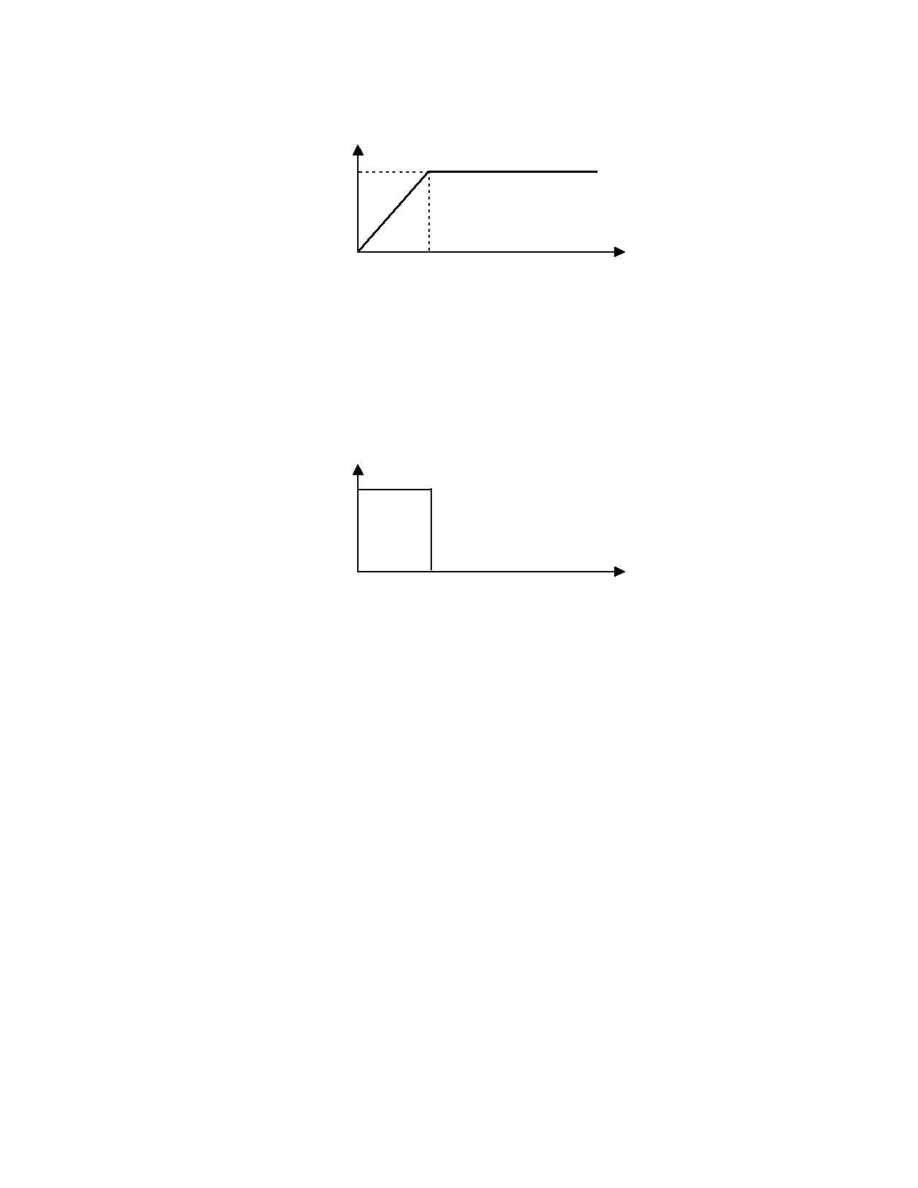
The linear profile of the velocity as the motor starts to spin and finally reaches the jog
speed is referred to as a trapezoidal profile. Since the acceleration rate of 400,000
counts/sec
2
is constant, the motor reaches the 100,000 counts/sec jog speed in exactly
0.25 seconds. If we look at the acceleration versus time:
Acceleration
400,000 cts/s
2
time
.25 sec
0
The step shape of the acceleration versus time is the source of the sharp discontinuities
at the beginning of the move and at the point when the slew speed is reached at .25
seconds. These sharp corners can cause a sharp jerk in the mechanical motion, a
preferable velocity profile would gradually roll on the acceleration and roll off when the
desired speed is reached.
This smooth roll on and roll off of acceleration is where the S curve profile is needed.
For our example program using the Jog mode of motion, the IT command can provide
smoother transitions during the acceleration of the motor. The S curve profiling is
achieved by the use of an algorithm that smoothes the square pulse of acceleration with
a single time constant digital filter.
Again, let us consider the motion program example above. If the acceleration step is
filtered by a single time constant low pass filter, the acceleration versus time graph will
look like this: