Galil Motion Control note 2311 Page 6
BGX
Begin motion on X axis
#WAIT
Loop
JP #WAIT,V1=0
Continue looping until variable
EQ 0,0
Quit Ecam mode
STX
Stop motion on X axis
EB0
Disable Ecam mode
EN
End program
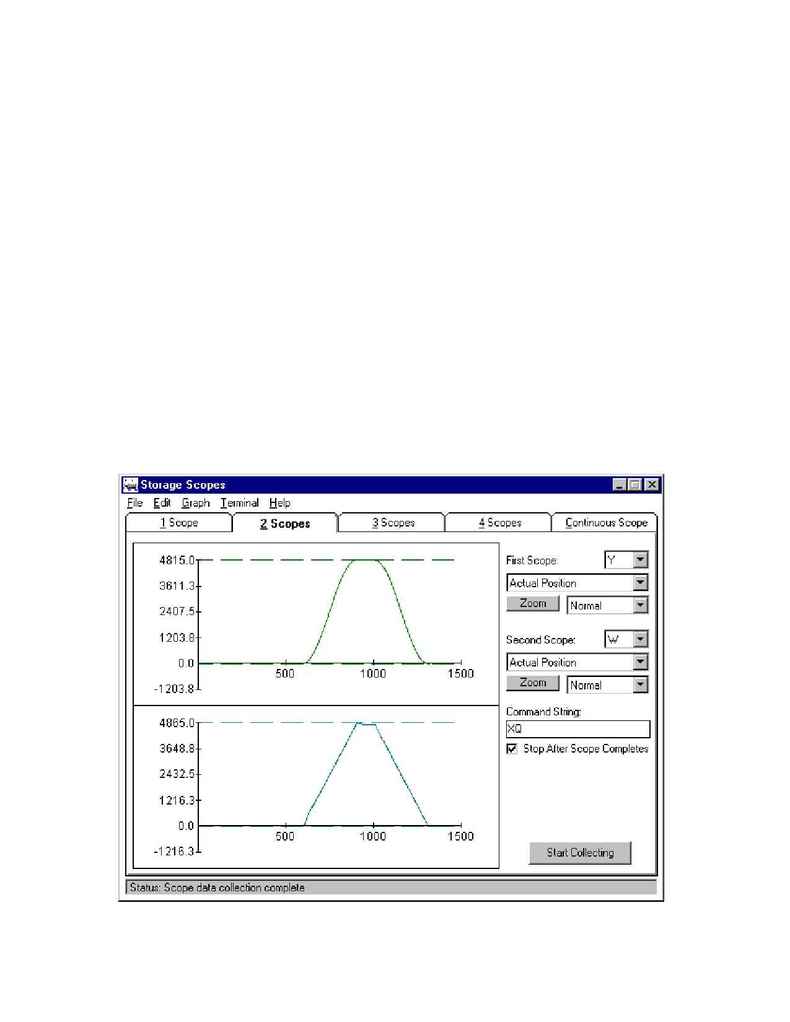
Results:
Executing the above described ecam motion and a piecewise linear motion
for comparison, the benefit of sinusoidal interpolation is illustrated in figure
3. This scope capture shows the maximum overshoot as the slave goes
from position 0 to position 4800. With sinusoidal interpolation (top trace),
the overshoot is 15 counts. With piecewise linear motion, the overshoot is
65 counts.