Galil Motion Control note 2311 Page 2
This motion profile presents some problems for high speed, smooth slave
motion. This is due to the instantaneous velocity change required at point
A thru D. Such velocity changes can cause system jerk and overshoot.
The effect is to limit the maximum speed of operation (to avoid excessive
position error and system vibration).
Sinusoidal Interpolation:
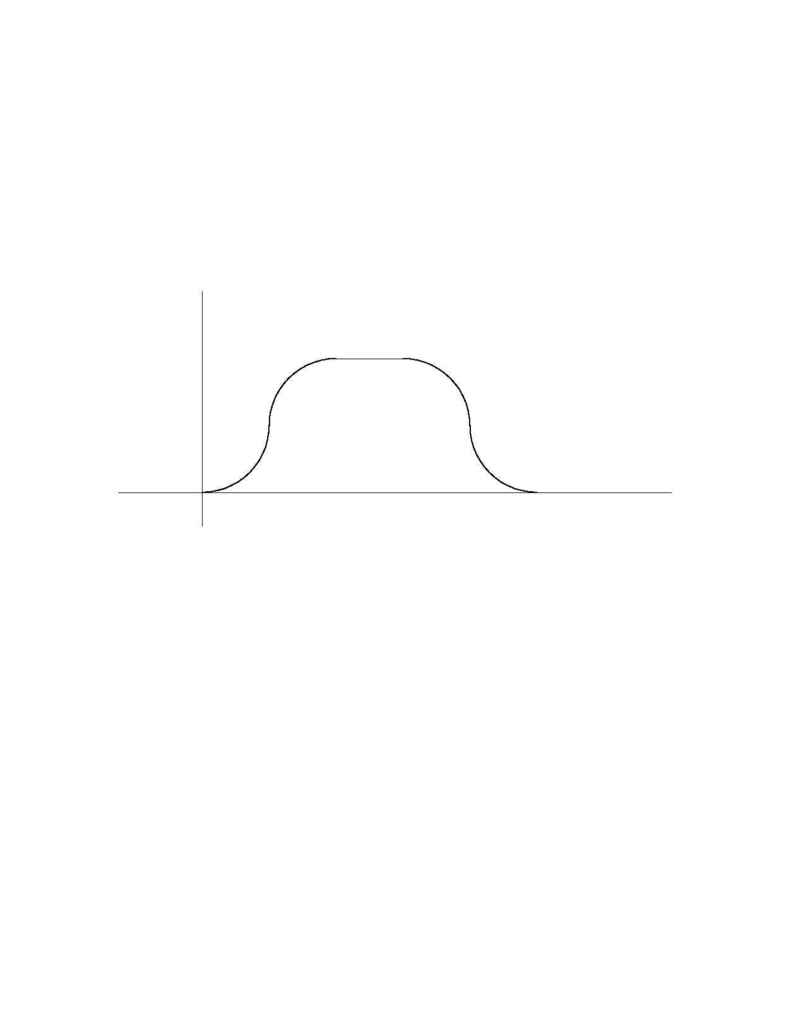
With sinusoidal interpolation, the ECAM profile is modified to provide a
smooth transition from point A to point E as is illustrated in figure 2.
A
B
E
D
C
POSITION
TIME
Figure 2
In this case, the slave axis accelerates slowly to a constant speed, then
decelerates to a speed of zero as it moves from point A to point B. From
point B to point C, the slave maintains it's position with a speed of zero.
From point C to point D, the slave again accelerates slowly to a constant
speed, and decelerates back down to zero. The smoothing effect is created
by using ½ of a sine wave to interpolate the motion profile.
Method:
The cam table entries can be calculated by including the following formula
into a DMC application program.
N=1
#LOOP
ET[N]=STPOS+((ENDPOS-STPOS)*((1-@COS[(N*RES)]))/2)
N=N+1
JP #LOOP,N < X