Galil Motion Control programming Page 12
Technical Reference
Motion Programming
16
www.galilmc.com / Galil Motion Control, Inc.
INSTRUCTION
INTERPRETATION
GA Y,,Y
Y is master
GR 5,,-2.5
X ratio=5, Z ratio=-2.5
PR,10000
Specify Y distance
SP,10000
Specify Y speed
AC,250000
Specify Y acceleration
DC,250000
Specify Y deceleration
BG Y
Begin motion
EN
End program
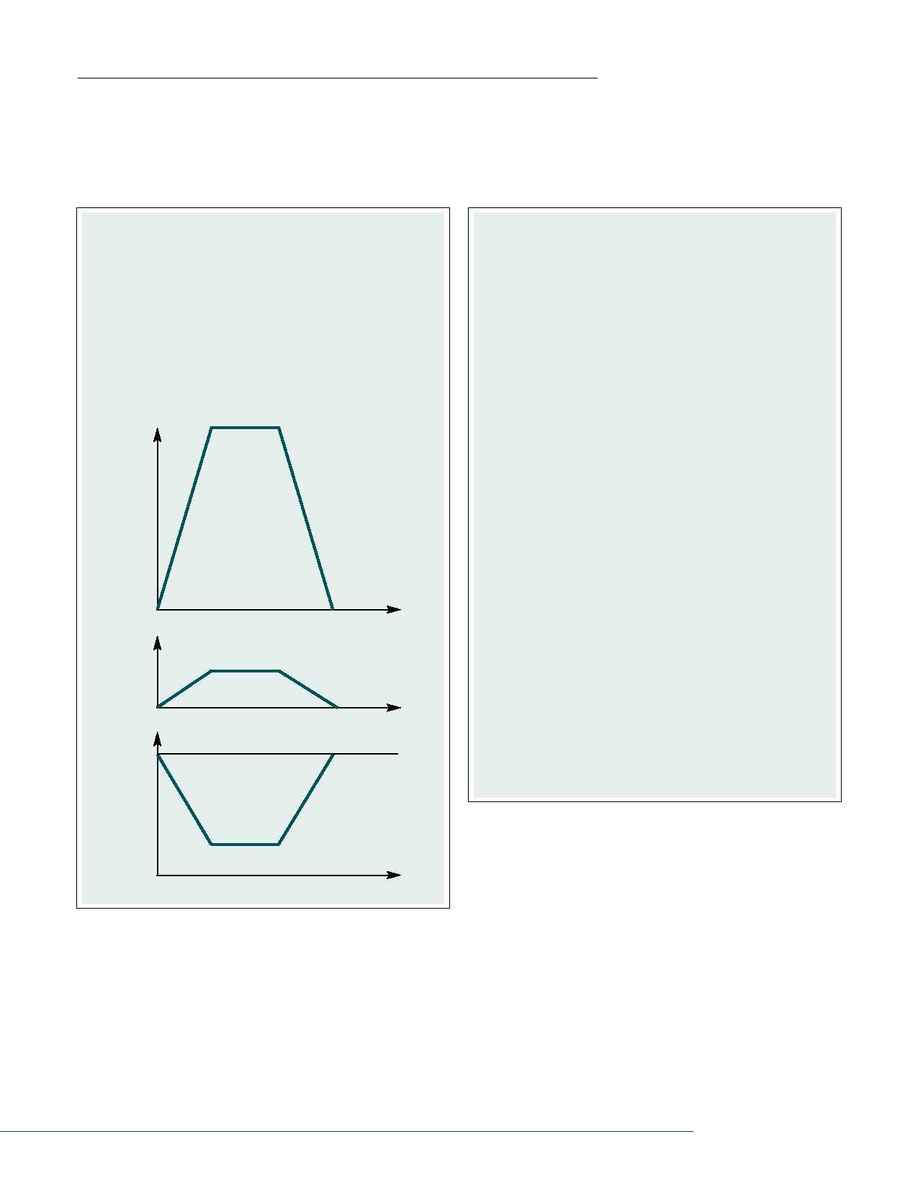
Example--Electronic Gearing
MASTER Y AXIS
10000
TIME
X
VELOCITY
TIME
Y
VELOCITY
TIME
Z
VELOCITY
25000
SLAVE X AXIS
SLAVE Z AXIS
50000
The electronic gearing mode is also useful for rotating knife applica-
tions. Suppose a rotating knife must cut moving paper at lengths vary-
ing between 8" and 40"; the circumference of the knife equals 20".
During the cutting interval, the linear velocity of the paper and knife
must be equal.
The design approach is to run the knife in the electronic gearing
mode to match the paper speed then advance or retard the knife dur-
ing the non-contact interval to cut the correct length paper.The posi-
tion of the moving paper can be sensed by an encoder with a resolu-
tion of 2000 counts per inch.The encoder is the master and is connect-
ed to the X axis. Suppose the resolution of the knife encoder is 20,000
counts per revolution which equals 20".This results in 1000 counts per
inch.To synchronize the two, the knife may be set as the slave with a
gear ratio of 0.5.This, however, cuts the paper at 20" sections.To cut
12" sections, the knife must advance 8 additional inches or 8000 counts
during the non-contact interval.
The following program performs the required move. It is assumed
that a sensor connected to Input 1 indicates the end of the cutting
interval.
INSTRUCTION
INTERPRETATION
#KNIFE
Label
GA,X
Set X encoder as master
GR,0.5
Set Y gear ratio
#LOOP
AI 1
Wait for signal to end cutting interval
PR,8000
Move additional distance
BG Y
Start move
AM Y
After correction is completed
JP #LOOP
Repeat the cycle
EN
End program
Example--Rotating Knife