CONTROLLERS
--
INTRO
www.galilmc.com
/
Galil Motion Control, Inc.
7
Command Language
Galil`s Command Language is comprised of intuitive, two-letter, English-
like ASCII commands that make programming as quick and easy as
possible. For example, the "BG" command begins motion while the "SP
2000, 4000" command sets the speed of the X-axis as "2000" and the
Y-axis to "4000." Commands are included for system set-up, tuning, pre-
scribing motion, error handling and applications programming. Custom
commands can be created upon request.
One of the more powerful features of all Galil controllers is their
ability to store and execute complex application programs designed by
the user. Application programs can be downloaded directly to the con-
troller and executed without host intervention.The main benefit is that
this frees the PC for system-level tasks. In fact, Galil controllers permit
multitasking, which allows up to eight programs to execute simultane-
ously. Also, special commands are available for application programming
including event triggers, IF/THEN/ELSE statements, conditional jumps,
subroutines, symbolic variables and arrays.
Ki
s
Kp
FA
FV
S
Kd·s
R
OF
TL
PL
NF
IL
OUT
LOW
PASS
NOTCH
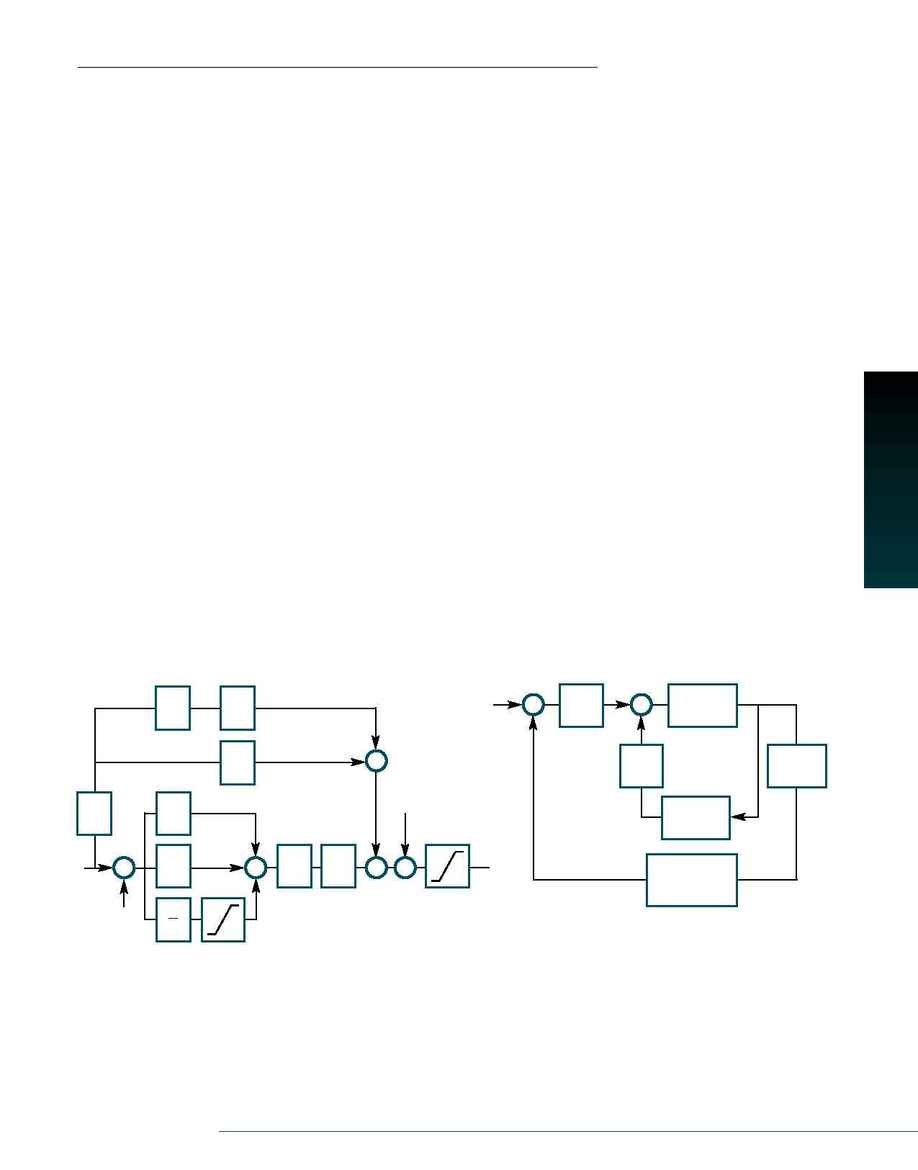
PID Block Diagram
Dual-loop Block Diagram
+
S
AMP/MOTOR
R
+
+
-
-
MOTOR
ENCODER
LOAD SENSOR
D
LOAD
PI
BACKLASH
Servo Motor Compensation Features
Galil controllers provide a compensation filter, which includes a PID
(Proportional-Integral-Derivative) filter followed by a notch filter and a
low-pass filter.The compensation also includes velocity and acceleration
feedforward. All filter parameters are adjustable, allowing servo system
tuning for best performance. Dual loop control is provided for reducing
the effect of backlash.
The dual-loop (DV) feature enables the controller to compensate for
mechanical backlash.Typically, dual-loop systems use a rotary encoder
on the motor and a linear encoder on the load (Galil Optima controllers
accept inputs from two encoders per axis as a standard feature). Dual-
loop control changes the standard PID control and closes the position
loop with the load encoder ("PI") and derives the damping terms ("D")
from the motor encoder.This method provides smooth and accurate
control along the motion path regardless of backlash.
Most Galil controllers also include a sinusoidal commutation feature
that allows designers to use lower-cost servo drives.This feature assures
smooth motion and reduces torque ripple when using brushless motors.
Each axis of sinusoidal commutated motion requires two DAC outputs
that are phase shifted by 120°.The servo amplifier generates the third
commutation signal.The commutation can be initialized with or with-
out hall sensors.Two controller axes are required for each brushless
motor. For example, a two-axis controller is required to drive one brush-
less motor with sinusoidal commutation.
General Description
Galil Controllers