Linear Interpolation
(for controllers with two or more axes)
The linear interpolation mode (LM) allows any arbitrary path of up
to 8 axes to be defined as a set of linear segments (LI).The vector speed
(VS), vector acceleration (VA), vector deceleration (VD), and vector
smoothing (VT) are also defined. Up to 511 LI segments can be given
prior to the start of motion and additional segments can be sent during
motion to allow paths of unlimited length to be followed.
Electronic Gearing
The electronic gearing mode makes it easy for Galil controllers to
simulate the motion of mechanical gears electronically. Any slave axis or
set of slave axes can be geared to a master at a prescribed gear ratio
defined by the GR command.The gear ratio can be changed on-the-fly
and the controller permits multiple masters as defined by the GA com-
mand. A powerful feature of electronic gearing is that an axis can be
geared and simultaneously be commanded to perform an independent
or vector move.This is useful for the position correction required in
packaging applications or when shapes must be cut on a moving con-
veyer belt.The electronic gearing mode is also useful for gantry applica-
tions where a special gantry mode (GM) command tightly couples two
axes by ensuring that gearing cannot be disabled.
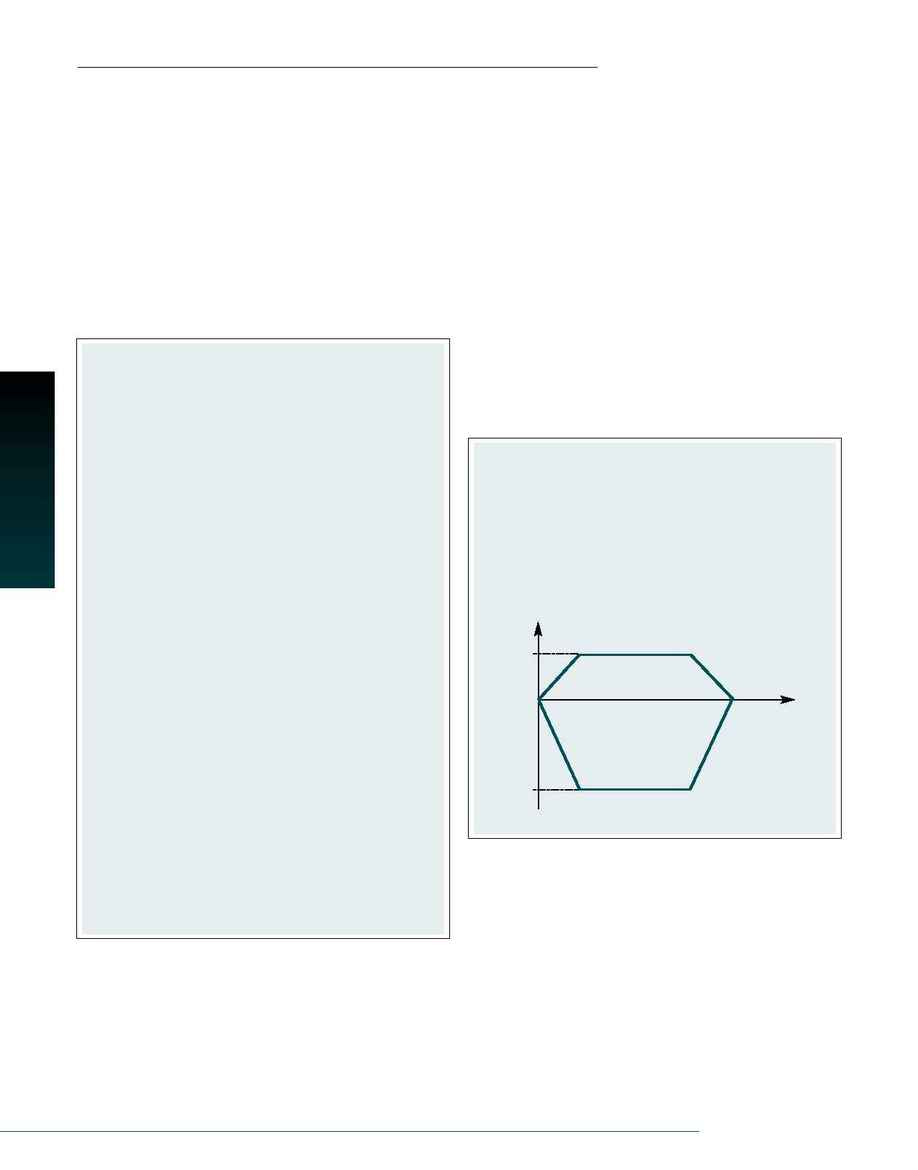
Example--Linear Interpolation
Example--Electronic Gearing
Move a cartesian robot through the following points with the
coordinates indicated in inches.
P0 (0,0,0)
P1 (4,2,1)
P2 (6,6,2)
P3 (8,8,0)
Assume that the resolutions of all the axes are 1000 counts/inch, and set
the required speed to 1.2 inches/sec (1200 counts/sec) and the accelera-
tion and deceleration to 100 in/sec
2
(100000 counts/sec
2
). Note that
the LM mode requires defining the segments in incremental form.
Point
Coordinate
Difference
P0
0,0,0
P1
4000,2000,1000
4000,2000,1000
P2
6000,6000,2000
2000,4000,1000
P3
8000,8000,0
2000,2000,-2000
PROGRAM
INTERPRETATION
#C
Label
CAS
Set coordinate system
LM XYZ
Define XYZ space
VS 1200
Vector speed
VA 100000
Vector acceleration
VD 100000
Vector deceleration
LI 4000,2000,1000
Segment P0-P1
LI 2000,4000,1000
Segment P1-P2
LI 2000,2000,-2000 Segment P2-P3
LE
End of move
BGS
Start the motion
EN
End program
TIME
VELOCITY
20,000
-40,000
Z
X
PROGRAM
INTERPRETATION
GA Y,,Y
Specify Y axis as master of X and Z
GR 2,,-4
Specify gear ratios for X and Z
PRY=50000
Specify end position of master
ACY=1000000
Specify acceleration of master
DCY=1000000
Specify deceleration of master
SPY=10000
Specify slew speed of master
BG Y
Begin motion
10
www.galilmc.com
/
Galil Motion Control, Inc.
General Description
Galil Controllers
CONTROLLERS
--
INTRO