8
www.galilmc.com
/
Galil Motion Control, Inc.
CONTROLLERS
--
INTRO
Modes of Motion
Point-to-Point Motion
Any combination of axes can be operated in the Point-to-Point
Motion mode to allow the target position (PA or PR), slew speed (SP),
acceleration (AC) and deceleration (DC) to be specified independently for
each axis.That way, motion on any axis can be started and stopped inde-
pendently. Upon begin (BG), the controller generates a trapezoidal veloci-
ty profile where the speed and acceleration can be changed anytime dur-
ing motion. For applications that require smooth motion without abrupt
velocity transitions, a motion smoothing function (IT) is provided.The
position (TP) and position error (TE) may be interrogated at anytime.
Jogging
In the jog mode, each axis is given a jog speed and direction (JG),
acceleration (AC), and deceleration (DC). Upon begin (BG), the controller
ramps up to the jog speed at the prescribed acceleration following a
trapezoidal profile. A smoothing function (IT) is provided to smooth
abrupt velocity transitions.The stop command (ST) stops the motion at
the prescribed deceleration rate.The jog speed and direction, accelera-
tion and deceleration may be changed at anytime during motion.The
average speed can be interrogated at any time using the Tell Velocity
(TV) command.
Example--Velocity Control by a Potentiometer
Example--Point-to-Point Motion
COMMAND
INTERPRETATION
AC 1000000
Specify acceleration
DC 1000000
Specify deceleration
SP 20000
Specify slew speed
PR 40000
Specify distance
BG
Begin motion
To control the motor velocity by a potentiometer, connect the
potentiometer to analog input #1 and read its voltage. Set the
motor speed in proportion to the analog input with a maximum
speed of 100,000 counts/sec for a 10 Volt input. Also, limit the
acceleration and deceleration to 500,000 counts/sec
2
.
COMMAND
INTERPRETATION
#A
Label
JG 0
Initial speed
AC 500000
Acceleration
DC 500000
Deceleration
BGX
Begin motion
#LOOP
Label
JG@AN[1]*10000
Read potentiometer and update speed
JP#LOOP
Repeat
EN
End program
2D Linear and Circular Interpolation
(for controllers with two or more axes)
The Vector Mode (VM) is an extremely powerful mode where any
two-dimensional path consisting of straight-line (VP) and arc segments
(CR) can be prescribed. Up to 511 segments can be given prior to the
start of motion and additional segments can be sent during motion
allowing unlimited motion paths to be followed without stopping.The
vector speed (VS), vector acceleration (VA), vector deceleration (VD),
and motion smoothing (VT) are also prescribed.The vector speed can be
changed at anytime during motion, permitting feedrate override, slow
down around corners and assignment of different speeds to specific
segments. Setting the vector speed to zero and increasing the vector
speed to resume can easily accomplish a pause during motion.
The vector mode can be operated on two sets of coordinated axes at
the same time using the CA command, which specifies the plane of
motion as S and T. By having dual sets of coordinated motion, users can
accomplish completely separate coordinated motion tasks with a single
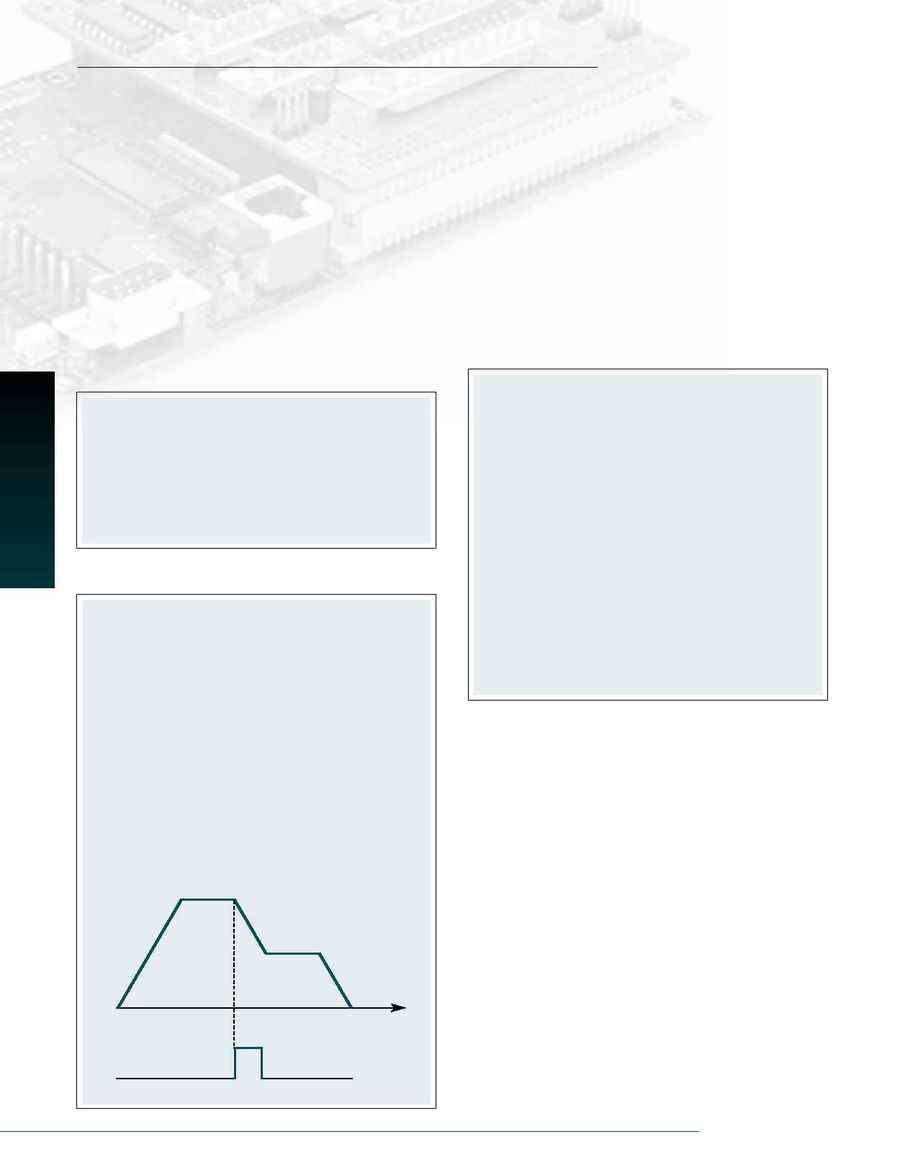
Example--Change Speed on Input
TIME
VELOCITY
INPUT 1
PROGRAM
INTERPRETATION
#A
Label
PR 20000
Distance
SP 50000
Initial speed
AC 1000000
Acceleration rate
DC 1000000
Deceleration rate
BGX
Start the motion
AI 1
Wait for the sensor input
SP 25000
Reduce the speed
EN
End program
Move the x-axis forward a distance of 20000 counts at an initial speed
of 50000 counts/sec and with an acceleration and deceleration of
1000000 counts/sec
2
.As soon as the motor activates the sensor con-
nected to input 1, reduce the speed to 25000 counts/sec.
General Description
Galil Controllers