Email: galil@galilmc.com
·
www.galilmc.com
·
Galil Motion Control, Inc.
·
Introduction
7
2 encoder ports per servo axis: main for
closed loop & dual for general purpose. Use
dual encoder to read load position for backlash
compensation or handwheel input for position
adjustment or use as general purpose counters.
1-8 axes. Buy only what you need.
Steppers or servos, brush
motors, brushless motors or
hydraulic systems: config-
urable by user on any combi-
nation of axes. No need for sep-
arate controller hardware for dif-
ferent motor types.
DAC resolution to 16 bits.
Controls any size motor with any
resolution encoder.
Servo frequencies to 12 million
counts/sec; stepper to 3 million
steps/sec. Achieves high speed.
Allows high-resolution encoders
with no additional hardware.
High-speed position latch
input and high-speed encoder
compare output. Synchronizes
encoder with external I/O to
within 1 microsecond.
Optoisolated limits & home. Increases noise immunity.
8 uncommitted inputs (expandable). Synchronizes motion with
external events such as switches, PLC inputs, sensors, latch inputs.
8 uncommitted outputs (expandable). Synchronizes motion
with external events -activates relays, reports status, signals to
PLC.
8 analog inputs with 12-bit ADC (16-bit optional).
Synchronizes motion with external events, such as potentiometer
input, tension, force and temperature sensing, joysticks.
Analog position feedback. Useful for force control systems.
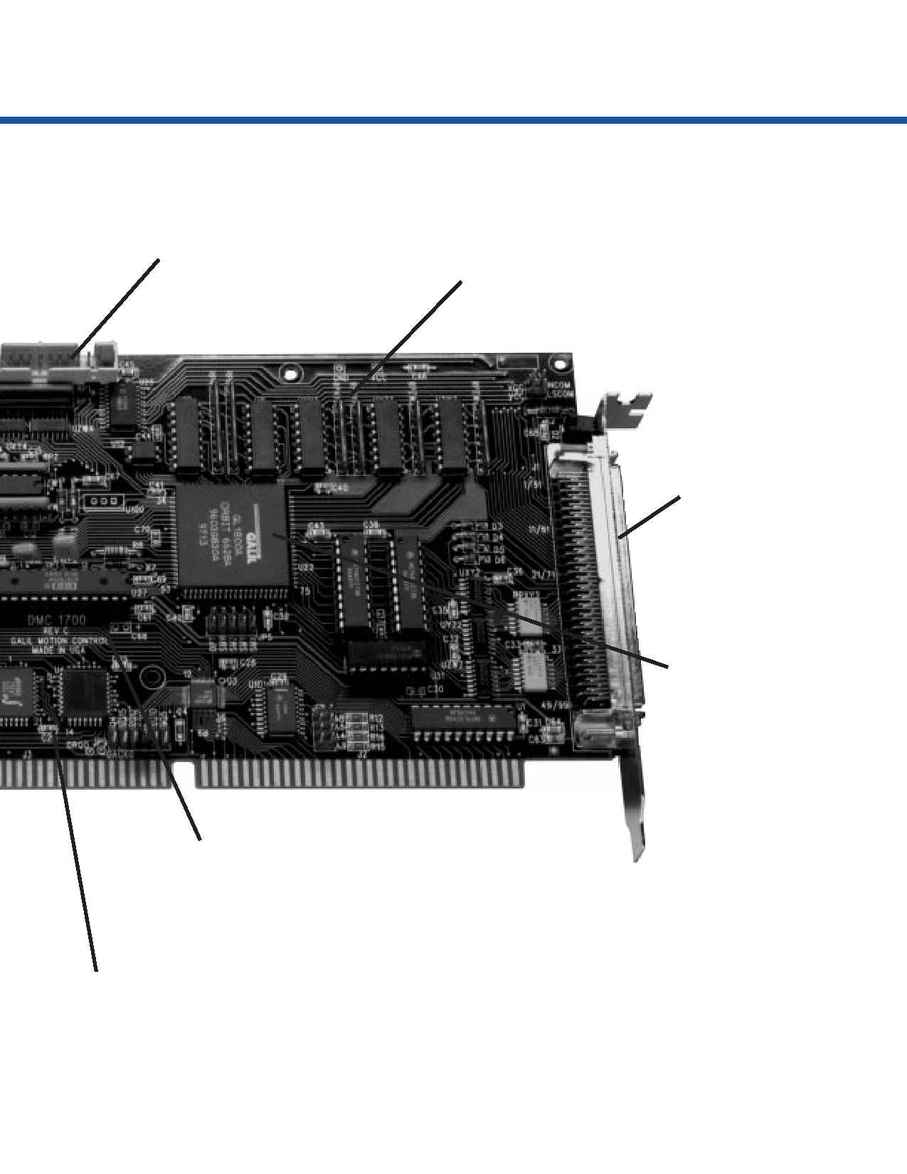
100-pin high-density
connector. Minimizes EMI.
DMA/2nd FIFO communications channel. Provides
instant access to status & parameters.
High-speed FIFO communications with bus interrupts.
Fast & convenient message-based communications.