M O T I O N C O N T R O L S Y S T E M S
OVERVIEW
Motion Control Systems
99
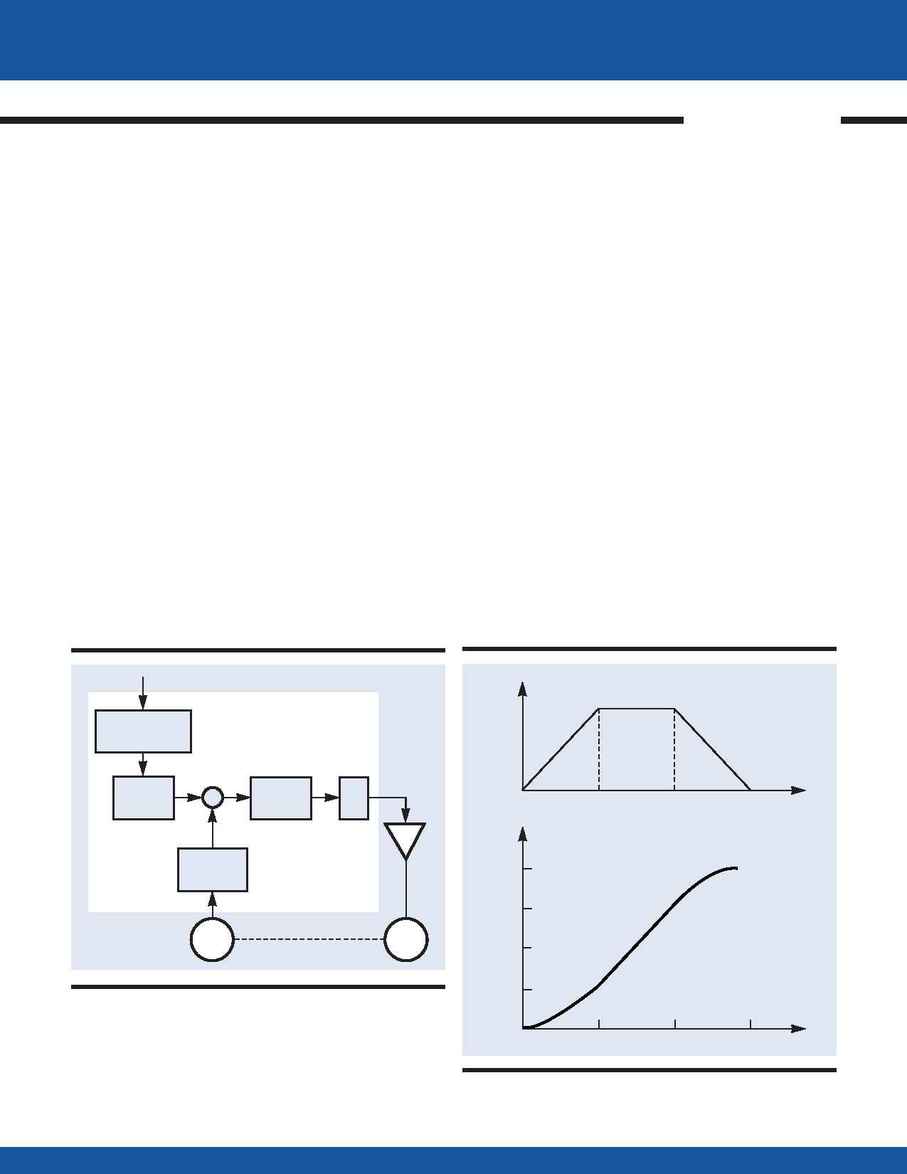
The motion controller performs the intelligent tasks of the
system, as shown in the block diagram. The basic tasks of the
motion controller include:
s
Decoding position feedback
s
Generating the desired position (profiling)
s
Closing the position loop
s
Stability compensation
The most fundamental function of the controller is to
decode the motor position and to close the loop. The motor
position, C, is determined from the feedback signal (often an
incremental encoder) and compared with the desired or refer-
ence position, R. E, the difference, C -R, is known as the
position error.
The objective of the controller is to reduce the value of
the position error, E, to a minimum without causing system
oscillations. To achieve that, the controller often includes a
stabilizing filter whose output is then applied via the digital-
to-analog converter (DAC) to the amplifier and the motor.
The most common type of stabilizing filter is proportion-
al-integral-derivative or PID. The proportional term is for
speed of response. The derivative term provides stability and
damping. The integral term is for system accuracy. Properly
tuning a servo system for optimum performance involves
adjusting the proportional, integral, and derivative coeffi-
cients or KP, KI, and KD, respectively.
The motion controller also performs "profiling" func-
tions, generating a time-dependent position function R(t),
which corresponds to the required velocity profile. For
example, in the velocity profile shown, the motion time
Motion Controllers
Functional Elements of a Motion Controller
Desired Velocity Profile (a)
and Corresponding Position (b)
MOTION
PROFILE
DAC
FILTER
POSITION
DECODER
MOTOR
AMP
ENCODER
COMMUNICATION
R
C
X
E
M
E
+
-
MOTION CONTROLLER
10000
7500
5000
2500
0
0
50
100
150 TIME (ms)
POSITION
(counts)
0
50
100
150 TIME (ms)
(b)
(a)
VELOCITY