Astronomical Applications Department, U.S. Naval Observatory Precession Maple Page 3
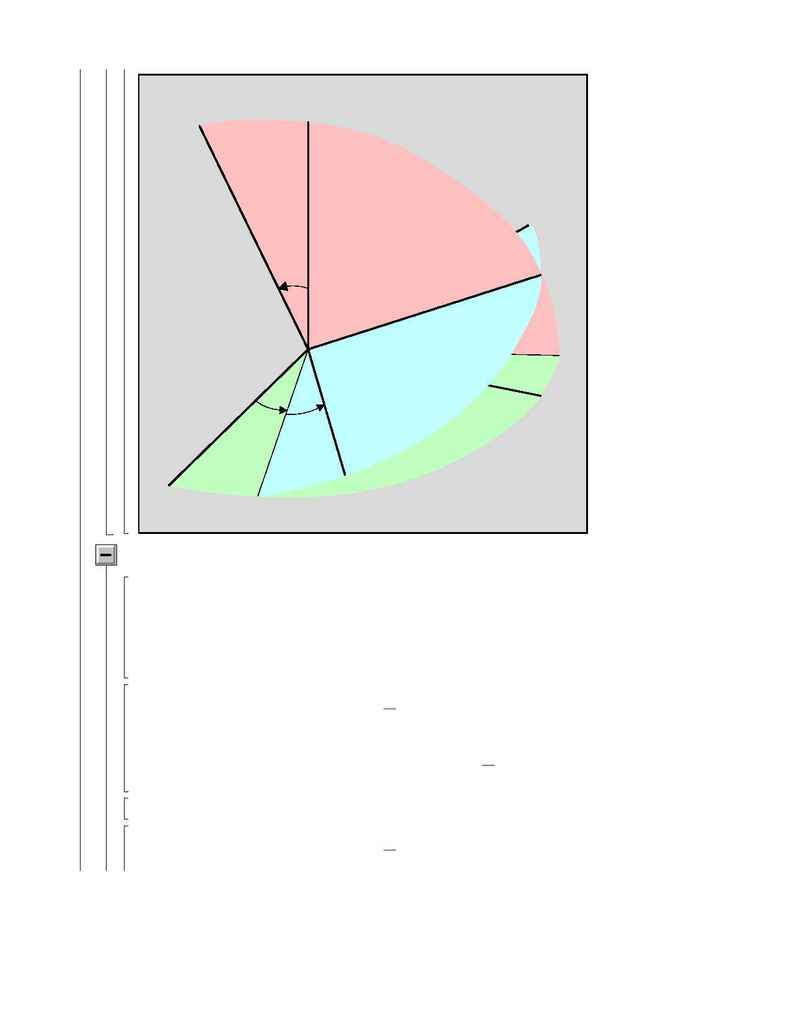
X
Y
Z
z
x
y
Figure 1
Angular Velocity Vector in the Body Frame
The angular velocity vector may be decomposed into components along each of the rotation
axes used to construct the transformation matrix. If we transform those components to the
body frame, then we can express the angular velocity vector in the body frame in terms of the
Euler angles (
,
,
). The component of
along the first rotation axis, as viewed in the body
frame, is
:=
(
)
evalm
(
)
R
,
,
0
&*
(
)
mat
, ,
0 0 1
t
:=
( )
sin
(
)
sin
( )
cos
(
)
sin
(
)
cos
t
The component along the Y' axis is, in the body frame,
:=
(
)
evalm
(
)
R
, ,
0 0
&*
(
)
mat
, ,
1 0 0
t
Page 3