3.1. Overview.
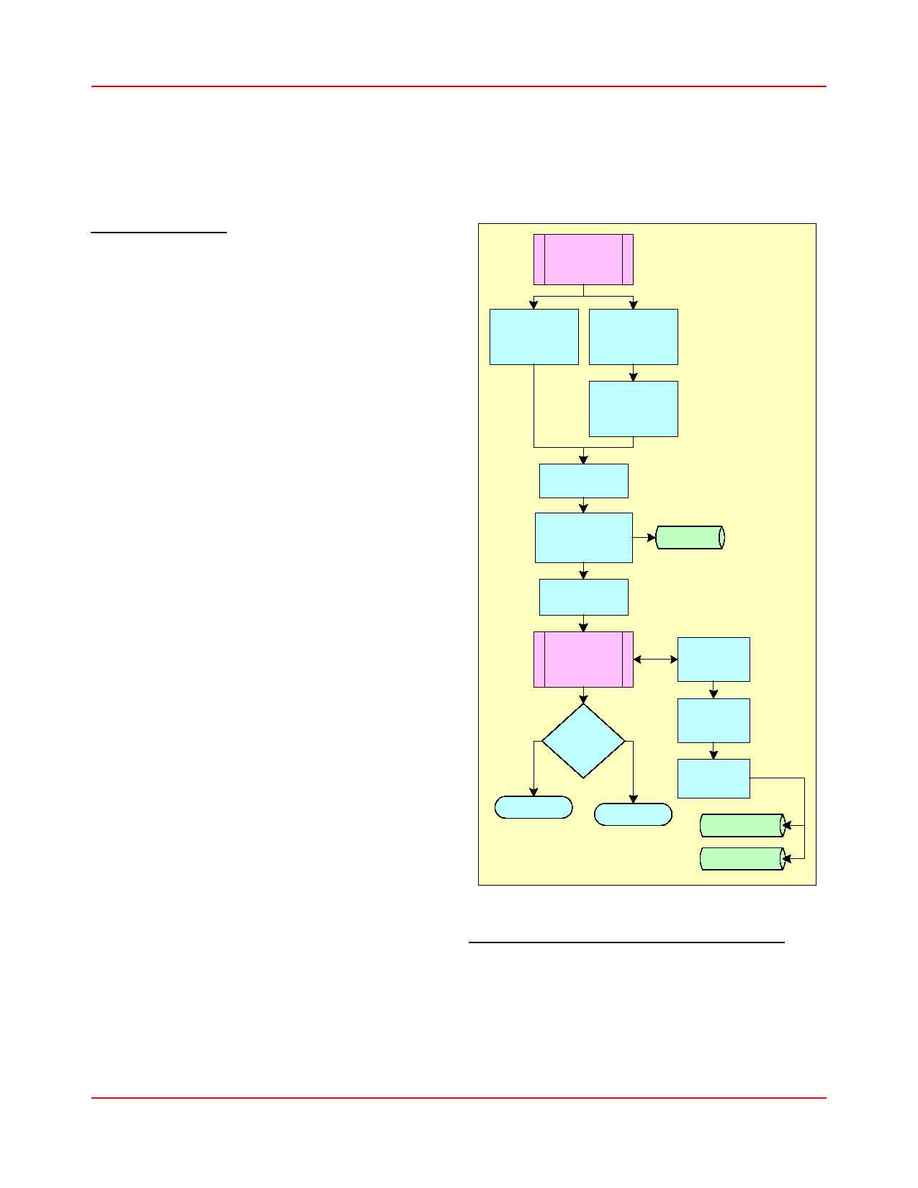
The parameter adjustment module is relatively
straightforward. The processed observations and the
calculated ephemeris data are requested and then
compared, forming the O-C residuals. First, coordi-
nate frame compatibility between the observations
and the synthetic ephemeris is reconciled. The calcu-
lated ephemeris must be transformed to apparent po-
sitions in order to match the observations. The
residuals are characterized, with statistical and de-
scriptive output going to disk as well as to an output
window on-screen. At this point, outlying data
points can be automatically detected and removed.
The core of the module follows with the determina-
tion of parameters via a maximum likelihood estima-
tor. The normal equations are formed and solved,
and the parameters and associated formal error esti-
mates are saved. Finally, the residuals are evaluated,
and the module exits with a solution "acceptability"
code. Figure 4 illustrates the process.
Matrix inversion is accomplished via singular
value decomposition (SVD), which is very robust
and offers useful diagnostics for ill-conditioned ma-
trices. Singularities are automatically detected and
corrected, and the problem parameters are identified.
In essence, if the algorithm encounters an ill-
conditioned matrix, it safely steps around the prob-
lem point(s) and proceeds in such a way as to mine
the matrix for the maximum amount of information.
When a singularity (rare in practice) or degenerate
column (not rare!) is encountered, the combination of
parameters that led to the fault is easily extracted.
Thus, not only are singularities safely handled, but
-- more importantly -- parameter combinations to
which the data are insensitive are automatically iden-
tified. It is unusual to encounter a computational
method that is this reliable and blowup-proof. I have
already developed and tested matrix inversion using
SVD and incorporated it into the Matrix utility class
(Chapter
??
). With regard to Newcomb, SVD is a
"plug'n'play" capability.
3.2. Linear Parameter Estimation.
If the observational errors are uncorrelated, then
maximum likelihood estimation becomes a simple
least squares estimation.
We will assume that the ob-
servational errors are uncorrelated and normally
distributed. More precisely, the data errors are
Chapter 3: The Parameter Adjustment Module
Chapter 3: Parameter Adjustment
D:\Newcomb\Documentation\NewcombManual.lwp
9 of 19
10:42pm April 23, 1997
Parameter
Adjustment
retrieve
massaged
observations
retrieve
calculated
ephemeris
calculate O-C
quantities
statistical
characterization
of residuals
statistics
form the
normal
equations
solve the
normal
equations
output
parameters
correlations
determine
parameters
evaluate
residuals
exit TRUE
exit FALSE
Figure 4.
Parameter
Adjustment
Module.
removal of
outliers
calculate
apparent
positions