ROBOTIC CARDIAC SURGERY
Volume 13, Number 6, 2003
457
midaxillary line via a 4-mm incision in the third ICS,
and intermittent antegrade cold blood cardioplegia
maintains cardiac arrest and myocardial protection.
Under video-assisted guidance, the posterior tine of
the clamp is passed through the transverse sinus with
care taken not to injure the right pulmonary artery,
left atrial appendage, left main coronary, or aorta.
After cardioplegic arrest, a transthoracic retractor
is used to expose the mitral valve through a 34 cm
left atriotomy made medially to the right superior
pulmonary vein entrance (
Fig. 4
).
After valve inspection, positions for da VinciTM left
and right arm port incisions are determined. Th
e right
trocar is placed in the fourth ICS posterior lateral to
the incision and parallel to the right superior pulmo-
nary vein. Occasionally, the fi fth ICS provides a better
angle for the right robotic arm. Th
e left trocar generally
is placed 6 cm cephalad and medial to the right trocar,
insuring internal clearance between arms to avoid both
external and internal confl icts. Optimal robotic arm
convergence avoids left atrial wall tearing during in-
strument manipulations. A high-magnifi cation camera
is used with a 30° (looking up), 3D endoscope placed
through the medial portion of the mini-thoracotomy.
Th
e remainder of the incision is used as a working port
for the assistant. Needles are retrieved using a long
magnetic device, and suture remnants are removed
from the surgical fi eld using vacuum assistance.
Operative procedures are performed from the
surgeon's console placed approximately ten feet from
the operating table but in the same operating room.
Th
e patient-side assistant changes instruments and
supplies and retrieves operative materials. Most often
an annuloplasty band (Edwards Lifesciences, Irvine,
California, USA) has been used to support repairs or
provide annular reduction. In video-assisted robotic
cases, early placement of annuloplasty sutures facili-
tates exposure during complex repairs. Exposure of
each new suture often becomes predicated on retrac-
tion of the previous one. Leafl et resections, papillary
muscle reconstruction, and chord insertions or trans-
positions should be performed after annular sutures
are completed and suspended. Each suture is placed
and tied intracorporeal. Upon completion of the re-
pair, robotic devices are removed, and the left atrium
is closed under direct vision to decrease operative
times. Standard de-airing and weaning procedures
are performed under TEE control. A typical robotic
mitral valve repair is depicted in
Figure 5
. One month
FIGURE 4. Operative view through the working port.
Note the excellent view of the mitral valve apparatus
with the left atrial retractor in place seen exiting through
the chest wall.
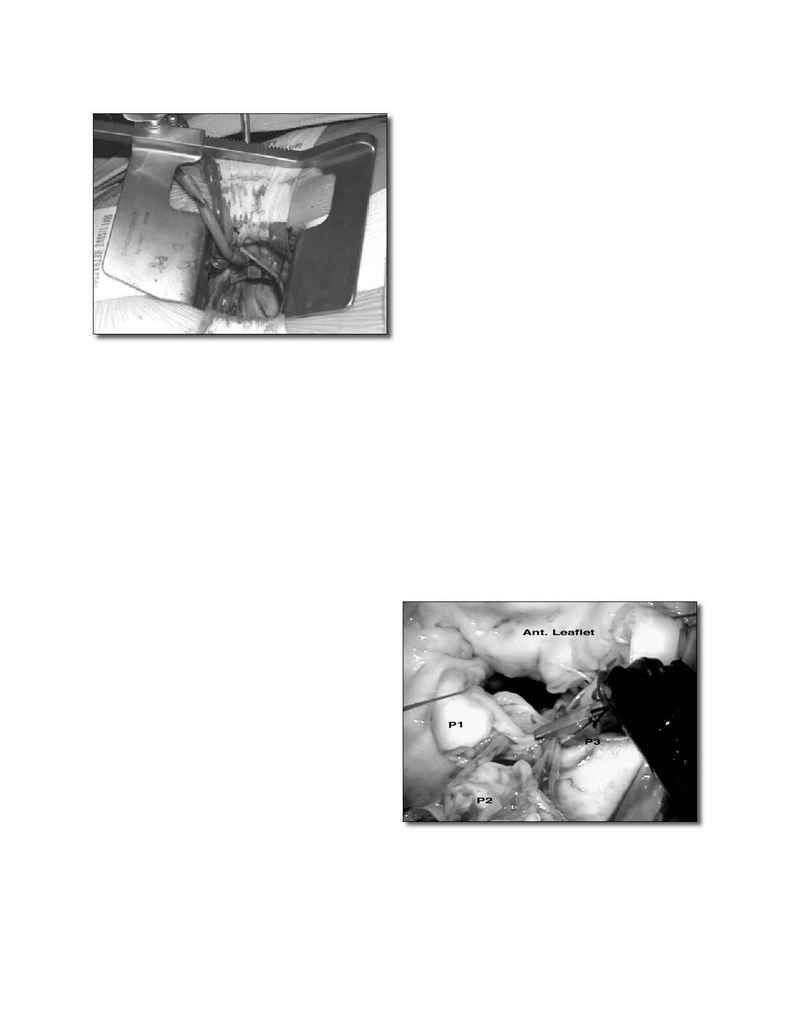
FIGURE 5. Typical da VinciTM mitral valve repair: the P
2
seg-
ment of the posterior leafl et is being resected by robotic
microscissors. The annulus is reduced and both P
1
and P
3
are approximated.