ROBOTIC CARDIAC SURGERY
Volume 13, Number 6, 2003
453
actions are transferred to an instrument cart, which
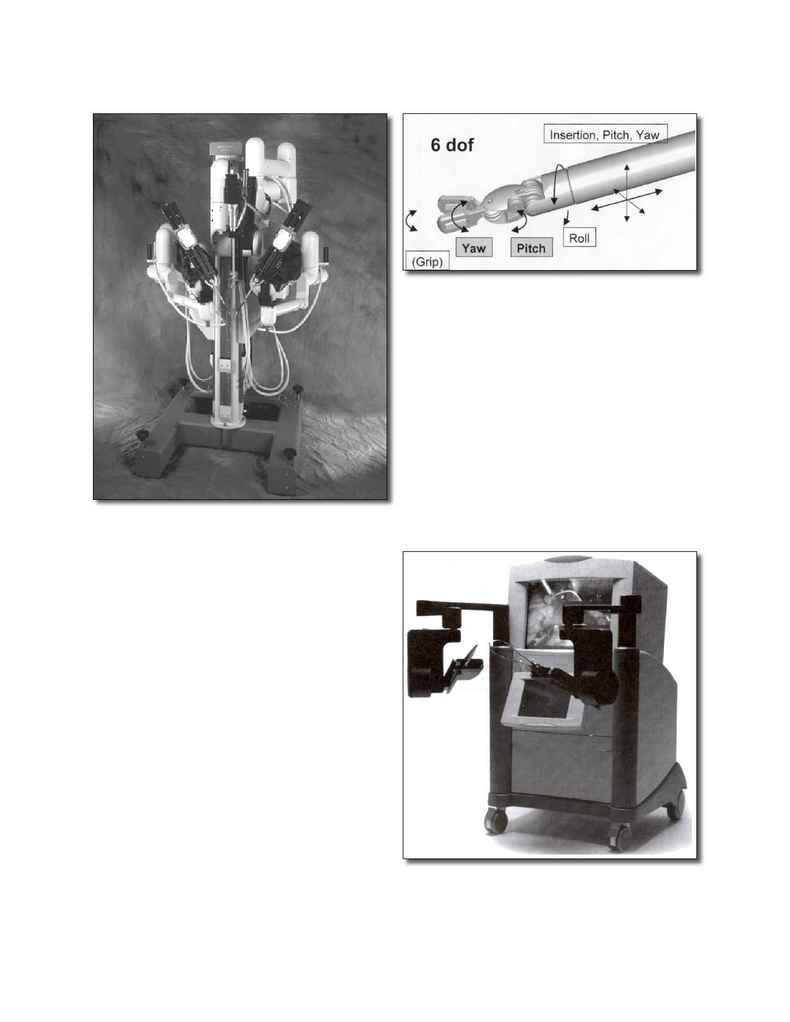
operates the synchronous end-eff ector instruments
(
Fig. 2
). "Wrist-like" instrument articulation emulates
the surgeon's actions at the tissue level, and dexterity
becomes enhanced through combined tremor sup-
pression and motion scaling. A clutching mechanism
enables readjustment of hand position to maintain an
optimal ergonomic attitude with respect to the visual
fi eld. Th
e three-dimensional digital visioning system
enables natural depth perception with high-power
magnifi cation (10×). Visualization of the internal
thoracic artery, coronary arteries, and mitral appa-
ratus is excellent.
Th
e ZeusTM system comprises three interactive arms,
mounted directly on the operating table (
Fig. 3
). Al-
though the ZeusTM system lacks a fully articulated wrist
and allows only four degrees of freedom, the instru-
ment diameter is only 3.9-mm compared with the 7-
mm da Vinci arm. Th
e surgeon also works at a console
that controls the instrument arms. Th
e basic ZeusTM
visualization system is two-dimensional; however, it
can be used in combination with an independently
developed three-dimensional visualization system.
FIGURE 1B. da VinciTM robotic telemanipulation system:
the instrument cart.
FIGURE 2. da VinciTM robotic telemanipulation system:
end-effector arms demonstrating all axis of motion.
FIGURE 3A. ZeusTM surgical console. Note the two-di-
mensional monitor the surgeon uses.