Journal of Long-Term Effects of Medical Implants
A. P. KYPSON ET AL.
452
I. INTRODUCTION
Traditional cardiac surgery is performed through a
median sternotomy, which provides generous expo-
sure and access to all cardiac structures and the great
vessels. During the past decade, improvements in
endoscopic technology and techniques have resulted
in a substantial increase in the number of minimally
invasive noncardiac surgical procedures performed.
Unfortunately, because of the complexity of most
cardiovascular procedures, a median sternotomy and
cardiopulmonary bypass have been required.
However, in the early 1990s, alternative, less
traumatic methods for performing cardiothoracic
surgery were developed. Th
e minimally invasive di-
rect coronary artery bypass (MIDCAB) provided a
single vessel bypass on the anterior surface of a beating
heart through a small anterior thoracotomy. Th
e Port-
AccessTM (Cardiovations Inc., Ethicon, Somerville,
New Jersey) method involved endoscopic cardiac
surgery on an arrested heart using novel closed-
chest cardiopulmonary bypass and cardioplegic ar-
rest methods.¹²
Nevertheless, there were many limitations that pre-
cluded the widespread adaptation of these methods.
For example, standard endoscopic instruments, with
only four degrees of freedom, reduce dexterity signifi -
cantly. Working through fi xed entry points (trocars),
operators have to reverse hand motions (fulcrum ef-
fect), and at the same time, instrument drag induces
the need for higher manipulation forces, leading to
hand muscle fatigue.³
Computer-enhanced instrumentation systems
have been developed to overcome these and other
limitations. Systems can be classifi ed according to the
tasks they help perform. Th
e fi rst group functions as
an assisting tool that holds and positions instruments.
Th
e Automated Endoscopic System for Optimal
Positioning (AESOPTM 3000, Computer Motion,
Inc., Santa Barbara, California) is typically used to
guide an endoscope, which is controlled using voice
activation. One can order the robot to hold a specifi c
position or reorient to a specifi c operative fi eld, pro-
viding a clear and steady view without tremor. Th
e
second group consists of telemanipulators that were
invented to facilitate fi ne manipulations done under
remote conditions. Connected through a controller
panel, the operator's motions direct the remote ma-
nipulator or end-eff ector. Currently, in cardiac surgery
there are two telemanipulation systems in use--the
da VinciTM (Intuitive Surgical, Inc., Mountain View,
California) and the ZeusTM robotic system (Computer
Motion).
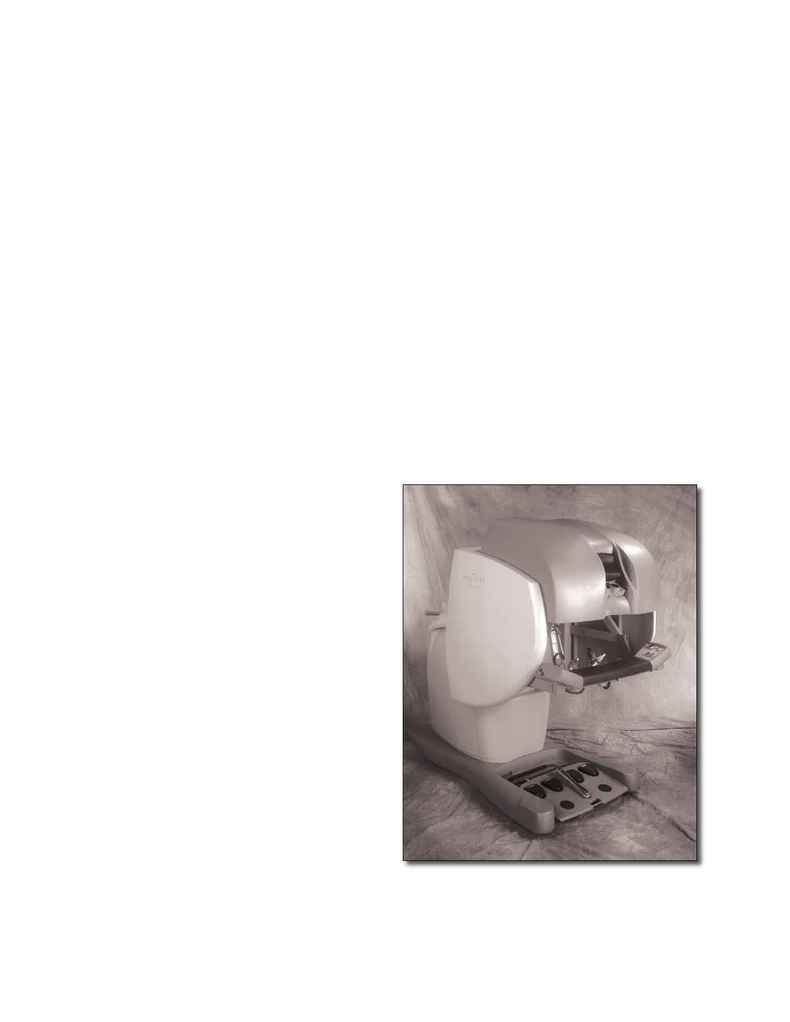
Th
e da VinciTM
system comprises three compo-
nents; a surgeon console, an instrument cart, and a
visioning platform (
Fig. 1
). Th
e operative console is
physically removed from the patient and allows the
surgeon to sit comfortably and ergonomically with
his/her head positioned in a three-dimensional vi-
sion array. Th
e surgeon's fi nger and wrist movements
are registered digitally, through sensors, and these
FIGURE 1A. da VinciTM robotic telemanipulation system:
operative console where the surgeon is seated.